
目前,应用于模式识别、系统测速等设计方案大都采用两片甚至更多微处理器的主从式结构,一片负责高速数据采集任务,一片负责完成复杂的信号处理,如FPGA+DSP、ARM+DSP等。本文主要涉及的关键技术有模拟线圈感应设计、车牌自动识别设计、汽车红外光测速设计等,考虑到营门区车流量较小,数据处理流量不大,但系统模块化程度高等特点,结合FPGA+DSP结构特点,采用了Xilinx公司Virtex 5系列的
XC5VSX50T芯片。如图2所示。Virtex 5系列是**个充分发挥了65 nm工艺性能、密度和成本优势的FPGA系列产品,提供550 MHz DSP48ESl-ice逻辑片支持,内置有25×18MAC,能够在资源使用率低于50 %的情况下实现单精度浮点运算。其特点是:速度等级更高、功耗更低、嵌入式处理器能力更强、DSP计算能力更大、简化了外部接口设计、成本进一步降俯。因此根据既要完成系统控制和数据采集任务,也要完成复杂的信号处理的要求,该芯片达到系统需求,符合成本低、重量轻、功耗小等要求。
1.4 虚拟线圈感应设计
为提取车辆信息,防止移动目标混淆系统工作,产生错误判断,采用一种虚拟线圈识别车型的方法。该方法将检测线与虚拟线圈相结合,对提取的移动信息进行预处理,以触发线检测到达预先设置位置的移动目标,然后触发虚拟线圈来提取移动目标特征,通过BP神经网络来识别出是否为车,是车判断“1”,系统进入下一步工作,不是车判断“0”,系统复位,降低了系统出错率,达到系统正常工作的目的。
触发线是在图像序列的适当位置设置一个平行条状的线型,当有车辆进入触发线时,通过当时触发线位置的像素与相应背景图像触发线位置的像素比较,如果触发线位置像素灰度值变化大于一定的阈值,就认为检测到车辆到达检测线的位置。如图3所示。
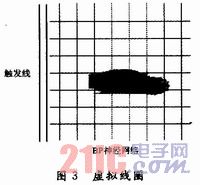
在图3中,红色方块代表着虚拟线圈。虚拟线圈就是在图像上设置一系列由N×N像素大小组成的方块。由于车辆到达触发线,触发线检测到2条黑色平行线间的像素变化,所以发出触发信号。当接收到检测线的触发信号时,可通过当前帧与背景图像的虚拟线圈位置的比较来判断每个小线圈是否有车辆占据。如果大于一定阈值可判断有车占据,并通过长、宽和面积可判断出具体车型。
1.5 车牌自动识别设计
汽车牌照自动识别是该系统主要功能模块之一。其功能是利用车牌是车辆身份的惟一标识的思想概念来智能识别和统计车辆。它主要采用**的图像处理、模式识别和人工智能技术,通过对车辆图像的采集和处理,获得车辆的数字化信息,以决定该车是否为本单位车辆。
车牌自动识别模块由车牌图像的捕获,车牌识别,识别结果处理等部分组成。车牌图像捕获 主要是利用图像采集装置将摄像机所采集的图像信息有效的传输至车牌识别系统内部,以便进行进一步的识别与处理。
车牌识别 是指当采集到的车牌图像传输到处理器XC5VSX50T芯片的DSP48e处理模块后,进行车牌的**定位、滤波去噪处理、字符分割、字符识别等步骤,通过车牌识别模块的核心识别算法来识别处车辆牌照的信息。如图4所示。
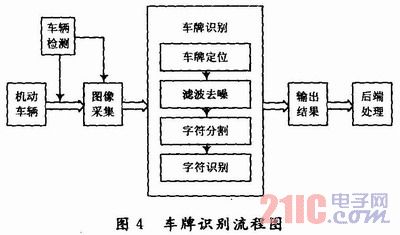
识别结果处理 识别结果由DSP发出后经过FPGA系统内部本单位车辆数据库的对比,进行验证。是本单位车辆,放行,系统复位;不是本单位车辆,进入下一步骤。
 2022年-中铁二十局集团有限公司雄商高铁站前七标项目经理部
2022年-中铁二十局集团有限公司雄商高铁站前七标项目经理部 2022年-陕西延长石油延安能源化工有限责任公司聚烯烃灌装
2022年-陕西延长石油延安能源化工有限责任公司聚烯烃灌装 2022年-麻家梁煤业有限责任公司工作面奥灰水地面区域治理
2022年-麻家梁煤业有限责任公司工作面奥灰水地面区域治理 2022年-亚洲基础设施投资银行贷款河南郑州等地特大暴
2022年-亚洲基础设施投资银行贷款河南郑州等地特大暴
 华润电力红安天明150MW风电项目220kV升压站PC工程
华润电力红安天明150MW风电项目220kV升压站PC工程 华润清远清新林泉扩建50MW风电项目主体施工工程招标公告
华润清远清新林泉扩建50MW风电项目主体施工工程招标公告 华润水泥合浦分布式光伏项目EPC工程总承包招标公告
华润水泥合浦分布式光伏项目EPC工程总承包招标公告 华润电力鲤鱼江电厂贮灰场环境治理及综合利用光伏项目110kV
华润电力鲤鱼江电厂贮灰场环境治理及综合利用光伏项目110kV 山西阳泉矿区泊里煤矿项目井底车场水仓、主排水泵房及主变电所掘
山西阳泉矿区泊里煤矿项目井底车场水仓、主排水泵房及主变电所掘 山西乡宁焦煤集团东沟煤业有限公司工业广场边坡项目治理工程总
山西乡宁焦煤集团东沟煤业有限公司工业广场边坡项目治理工程总 利用亚行贷款中国—东盟中小企业协同创新发展综合提升
利用亚行贷款中国—东盟中小企业协同创新发展综合提升 中铁二十局集团有限公司雄商高铁站前七标项目经理部粉煤灰
中铁二十局集团有限公司雄商高铁站前七标项目经理部粉煤灰 陕西延长石油延安能源化工有限责任公司聚烯烃灌装改造
陕西延长石油延安能源化工有限责任公司聚烯烃灌装改造 麻家梁煤业有限责任公司工作面奥灰水地面区域治理工程招标公告
麻家梁煤业有限责任公司工作面奥灰水地面区域治理工程招标公告 亚洲基础设施投资银行贷款河南郑州等地特大暴雨洪涝灾害灾后恢复
亚洲基础设施投资银行贷款河南郑州等地特大暴雨洪涝灾害灾后恢复 (2022年)鲁山豫能抽水蓄能有限公司河南鲁山抽水蓄能电站安
(2022年)鲁山豫能抽水蓄能有限公司河南鲁山抽水蓄能电站安 (2022年)海南新媒体绿都一期项目(西地块)电梯采购与安装
(2022年)海南新媒体绿都一期项目(西地块)电梯采购与安装 (2022年)同煤大唐塔山煤矿有限公司四盘区立井井筒装备安装
(2022年)同煤大唐塔山煤矿有限公司四盘区立井井筒装备安装 (2022年)亚洲开发银行贷款山西城乡水源保护和环境改善示范
(2022年)亚洲开发银行贷款山西城乡水源保护和环境改善示范 2022年-首钢股份公司迁安钢铁公司炼铁作业部烧结精
2022年-首钢股份公司迁安钢铁公司炼铁作业部烧结精 2022年-江苏省液化天然气储运调峰工程项目取排水工程施工
2022年-江苏省液化天然气储运调峰工程项目取排水工程施工 2022年-山西忻州神达万鑫安平煤业有限公司矿井兼并重组整合
2022年-山西忻州神达万鑫安平煤业有限公司矿井兼并重组整合 2022年-山西忻州神达原宁煤业有限公司90万吨/年矿井兼并
2022年-山西忻州神达原宁煤业有限公司90万吨/年矿井兼并 2022年-成庄矿选煤厂煤泥干燥系统改造工程招标公告
2022年-成庄矿选煤厂煤泥干燥系统改造工程招标公告 2022年-高青县春汇综合智能仓配物流园项目施工总承包
2022年-高青县春汇综合智能仓配物流园项目施工总承包 2022年-陕西中烟工业有限责任公司汉中卷烟厂卷包除尘
2022年-陕西中烟工业有限责任公司汉中卷烟厂卷包除尘 2022年-同煤大唐塔山煤矿有限公司煤泥烘干生产线清洁热源工
2022年-同煤大唐塔山煤矿有限公司煤泥烘干生产线清洁热源工 2022年-承德航天天启风光储氢一体化多能互补示范项目
2022年-承德航天天启风光储氢一体化多能互补示范项目 2022年-利用亚洲开发银行贷款农业综合开发长江绿色生态廊道
2022年-利用亚洲开发银行贷款农业综合开发长江绿色生态廊道 2022年-嵩县前河矿业有限责任公司葚沟矿区天井钻机工程
2022年-嵩县前河矿业有限责任公司葚沟矿区天井钻机工程 2022年-广东陆河抽水蓄能电站施工电源工程建设项目招标公告
2022年-广东陆河抽水蓄能电站施工电源工程建设项目招标公告 首钢股份公司迁安钢铁公司炼铁作业部烧结精3、返8通廊加固设计
首钢股份公司迁安钢铁公司炼铁作业部烧结精3、返8通廊加固设计 江苏省液化天然气储运调峰工程项目取排水工程施工招标公告
江苏省液化天然气储运调峰工程项目取排水工程施工招标公告 山西忻州神达万鑫安平煤业有限公司矿井兼并重组整合项目矿建工程
山西忻州神达万鑫安平煤业有限公司矿井兼并重组整合项目矿建工程 山西忻州神达原宁煤业有限公司90万吨/年矿井兼并重组整合项目
山西忻州神达原宁煤业有限公司90万吨/年矿井兼并重组整合项目 高速公路上交通指示牌
高速公路上交通指示牌 西安恒力仪表SIGRID智能矢量变频电动执行器进口执行器替换
西安恒力仪表SIGRID智能矢量变频电动执行器进口执行器替换 斩拌机视频,125斩拌机视频,斩拌机切肉视频
斩拌机视频,125斩拌机视频,斩拌机切肉视频 回收微晶蜡
回收微晶蜡 多易拍华中区办事处广告宣传片
多易拍华中区办事处广告宣传片 煤炭化验设备
煤炭化验设备 东莞贝朗机械不锈钢线材折弯机设备魅力无限招人羡
东莞贝朗机械不锈钢线材折弯机设备魅力无限招人羡 三维动画、创意动画、影视动画广告
三维动画、创意动画、影视动画广告 五金模具产品
五金模具产品 质量最好粘钢胶厂家
质量最好粘钢胶厂家 公司形象
公司形象 304不锈钢卫浴管
304不锈钢卫浴管 双面单立柱
双面单立柱 深圳艾迪亚设计
深圳艾迪亚设计 异形卡,钥匙扣,IC卡,智能卡,匙扣卡,VIP卡,贵宾卡
异形卡,钥匙扣,IC卡,智能卡,匙扣卡,VIP卡,贵宾卡 酒店沙发
酒店沙发 青海省黄南州泽库县回收废旧化工原料13932031675
青海省黄南州泽库县回收废旧化工原料13932031675 北京收购MOS管
北京收购MOS管 闸北区徐汇一卡通回收
闸北区徐汇一卡通回收 金盐什么检测含量》
金盐什么检测含量》 上门回收家具漆阜宁价格
上门回收家具漆阜宁价格 北京电子产品回收价格北京二手电脑回收公司
北京电子产品回收价格北京二手电脑回收公司 港闸区大型发电机组出租18513089999(收购价格)
港闸区大型发电机组出租18513089999(收购价格) 《泰兴二手配电柜回收》+$铜板铜牌母线槽回收利用
《泰兴二手配电柜回收》+$铜板铜牌母线槽回收利用 呼和浩特大量废旧电缆回收 呼和浩特回收二手电缆18849275178
呼和浩特大量废旧电缆回收 呼和浩特回收二手电缆18849275178 江门恩平二手格力中央空调回收
江门恩平二手格力中央空调回收 全球与中国绿色果汁市场竞争现状与发展潜力分析报告2019年版
全球与中国绿色果汁市场竞争现状与发展潜力分析报告2019年版 无锡市潜水打捞队欢迎咨询
无锡市潜水打捞队欢迎咨询 诸城发电机出租、、租赁《惊喜》18663521519【长期有效】
诸城发电机出租、、租赁《惊喜》18663521519【长期有效】 河池自来水消毒设备供水补给
河池自来水消毒设备供水补给 遵义防腐木河边地板围栏厂18585095799
遵义防腐木河边地板围栏厂18585095799 QP980宝钢
QP980宝钢


















